

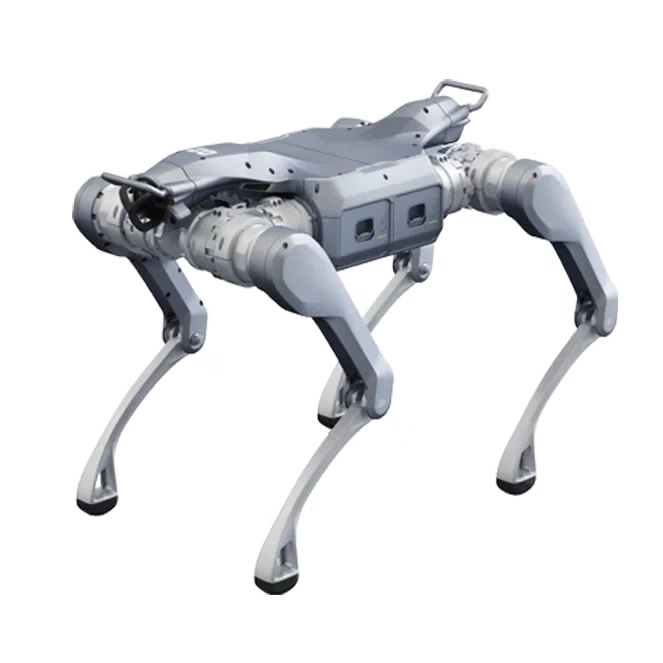
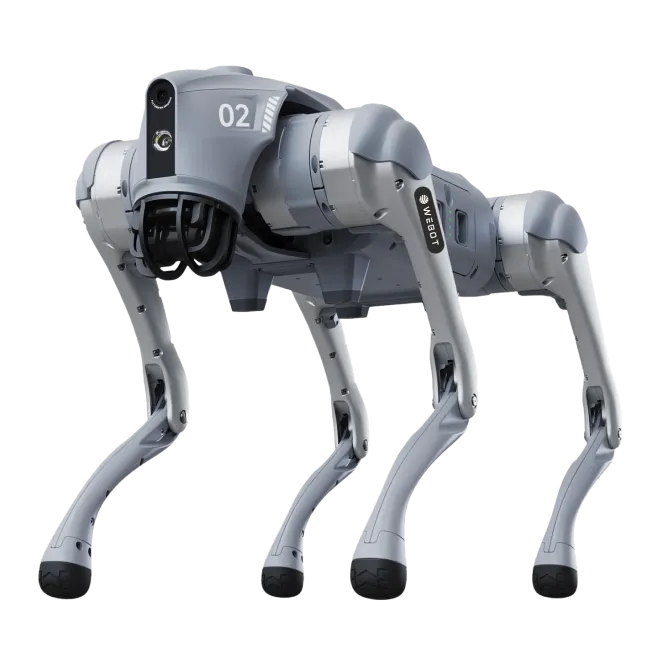
A dog robot, sometimes called a robot dog orquadroped, is a self-propelled machine that moves on four legs. It is designed to navigate environments where wheels or tracks are not sufficient. The idea is to mimic certain aspects of how a dog moves – not to be a companion animal, but to provide stable and adaptable mobility over uneven terrain, stairs, kerbs, gravel, grass and industrial areas. Using the kinematics of its legs, advanced sensors and real-time control, the dog robot can balance, recover from bumps and plan its steps in difficult environments, something that traditional ground robots often struggle with. In practice, the quadruped functions as a platform for sensors, cameras and other payloads. It can patrol, inspect, measure, film, carry tools, open doors (if properly equipped) and act as an extension of human vision and presence in places that are dangerous, difficult to reach or simply time-consuming for humans. Many models offer different operating modes: direct remote control (teleoperation), semi-autonomous missions between predefined points (waypoints) and fully autonomous patrols where the robot navigates itself, avoids obstacles and returns to its charging station. It is important to understand that the term ‘dog’ here refers to the gait (four-legged) and manoeuvrability, not to the robot having feelings or ‘thinking’ like a dog. It uses algorithms, sensor data and motor control – not instincts. For the user, this means that the robot is a tool: reliable in repetitive tasks, predictable within its limitations, and possible to document, measure, and quality assure. That is why dog robots are used in industry, construction, energy, mining, rescue services, research, and education, but also in the media and public communication about how robots can develop a sense of their body and spatial awareness. They use software that combines control theory, perception, planning and sometimes machine learning to translate their surroundings into stable gait and meaningful actions. In short, a dog robot is a robust and intelligent mobile platform that carries sensors and tools to places where humans may not always want or should be. It does this with a combination of safe foot placement, autonomous navigation and data-driven precision.
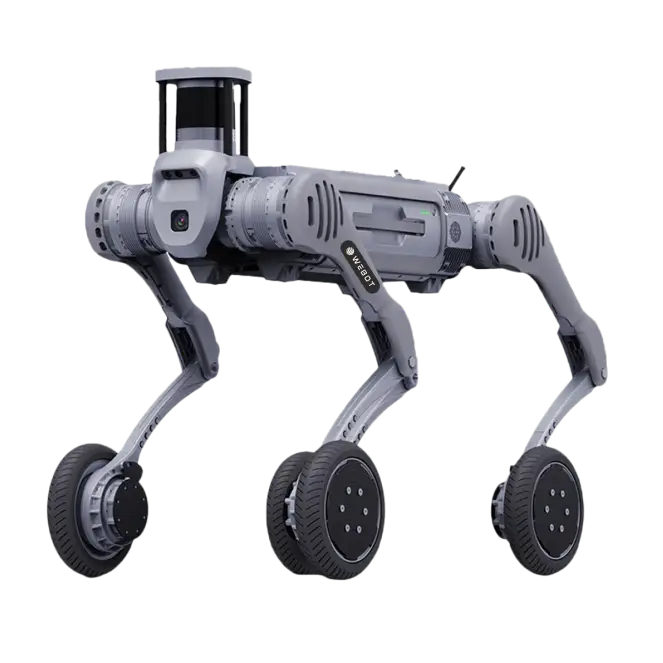
The core of a Quadruped is its legs. Each leg is usually made up of several joints controlled by motors with torque control. This allows the robot to move smoothly and flexibly, while maintaining reactive balance. Torque control, or force control, means that the robot not only ‘sets its position’ but also senses and adjusts the force in the joint. This is crucial for absorbing shocks, standing stable on uneven surfaces and avoiding tipping over. Gait patterns such as walking, trotting and galloping are defined by the software, and the robot can change patterns depending on the surface, speed and task. To know where it is and where it is going, the robot uses several different types of sensors: IMU (inertial measurement unit) to measure acceleration and rotational speed – this is the basis for balance and understanding its position in space. Cameras (RGB and sometimes depth cameras) to detect obstacles, steps, ground texture and objects. LIDAR for 3D scanning and accurate distance measurement, which is often used for mapping, localisation and autonomous navigation in complex environments. Positioning systems (such as UWB beacons or RTK-GPS in outdoor environments) to improve absolute position where needed.
Dog robots are machines and should be treated as such. A clear safety plan includes emergency stop procedures, clear zoning during public operation, operator training and signage where necessary. If the robot is equipped with cameras and microphones in environments where people are present, data processing must be documented, the purpose clarified and access to the material controlled. In work environments, risk assessment is a fundamental requirement: where can the robot get stuck, lose its footing, cause crushing situations or disrupt other traffic (such as forklifts, AGVs and pedestrian traffic)? Establish simple, proven procedures – better to have several small improvements than one ‘perfect’ procedure that never becomes a reality.